机器人软件安装指南
阿加犀已将机器人相关软件 ROS2 Humble、Gazebo、Moveit2 等上线到应用中心,本文档将介绍如何下载安装并做简单验证。
💡注意
当前仅在 Ubuntu22.04 上支持了机器人相关软件的安装。其他版本正在适配中,敬请等待。
1. 登录到 AidLux 系统的 Web 桌面
无论您所购买阿加犀硬件设备所搭载的系统是融合系统还是 Linux 系统,都需要登录到 AidLux 的 Web 桌面进行安装操作。具体登录方法可对应参见硬件指南中 Linux系统登录/融合系统登录 章节所示。
- Web 桌面如下所示:
- 点击左面下方
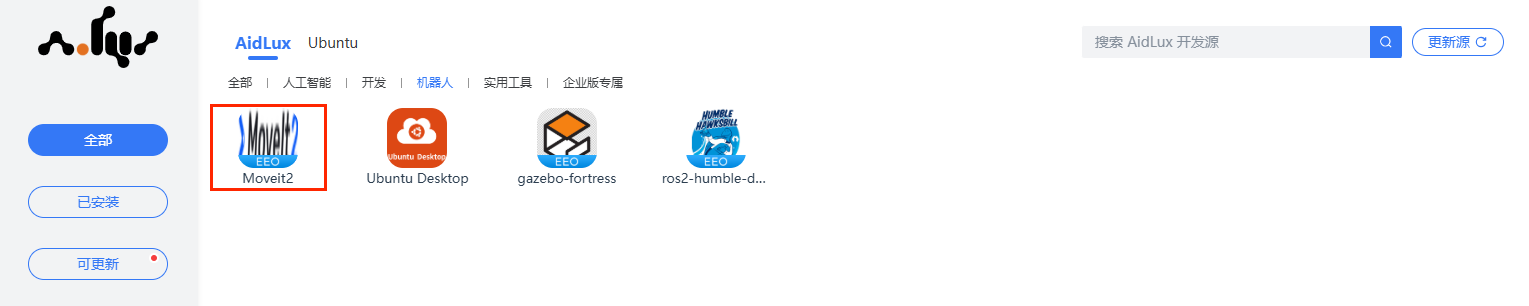
应用中心按钮 - 选择机器人
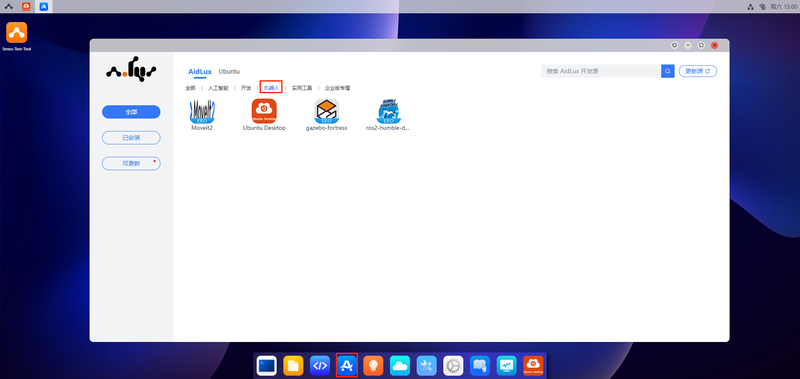
到达如上页面后,即可开始安装相关软件。
2. Ubuntu Desktop 安装
Ubuntu Desktop 基于 Linux 内核,为用户提供了一个稳定、高效且安全桌面环境,安装后用于机器人相关仿真软件的运行。
💡注意
部分设备系统默认安装了 Ubuntu Desktop,则无需再下载安装,可直接点击桌面图标启动服务后,通过 VNC 连接该桌面。
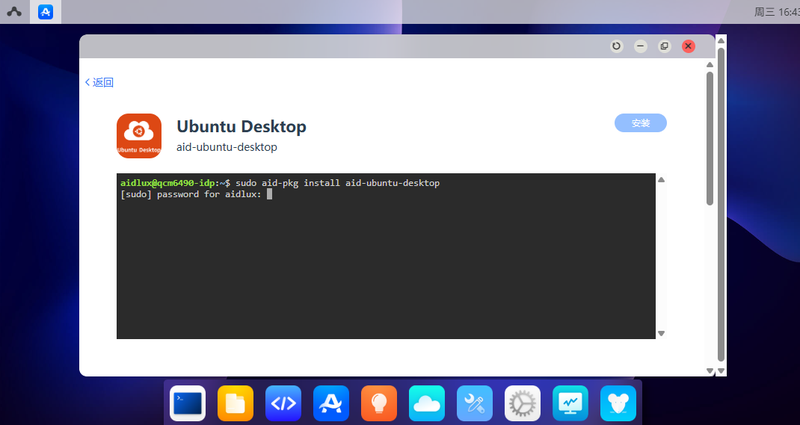
2.1 安装 Ubuntu Desktop
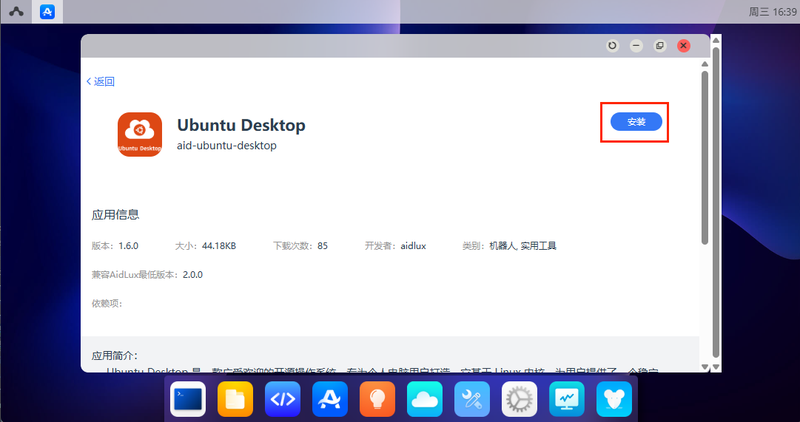
- 按第1步操作,进入到
机器人页面后,点击Ubuntu Desktop图标,跳转到安装页面

- 点击
安装按钮,输入AidLux密码:aidlux,等待安装完毕即可
2.2 通过 VNC 连接 Ubuntu Desktop(gnome 桌面)
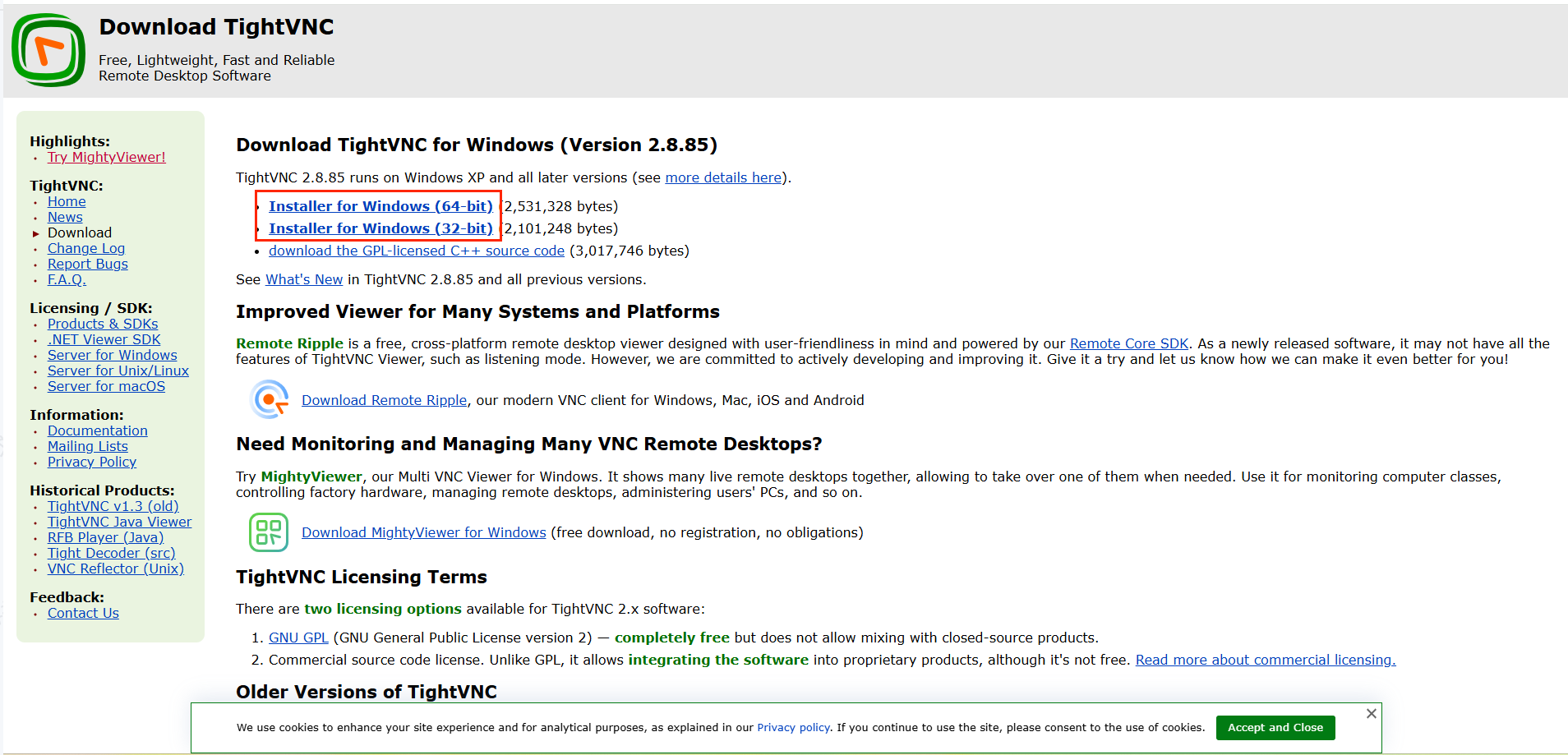
2.2.1 VNC 工具下载:
可根据如下链接下载 Tightvnc 工具,也可使用其他VNC工具连接。
下载链接:https://www.tightvnc.com/download.php
- 根据开发者的电脑系统选择不同的版本下载后安装。
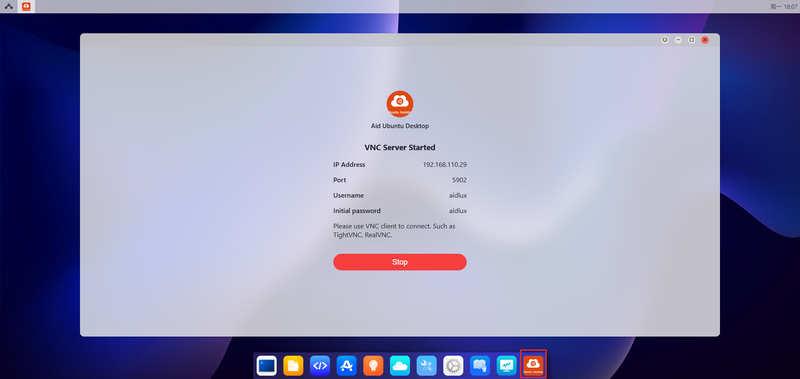
2.2.2 打开 Ubuntu Desktop 的 VNC server
- 点击桌面 Ubuntu Desktop 图标打开 Server 服务
2.2.3 打开 VNC 工具并连接 gnome 桌面
- 打开 TightVNC,输入设备
IP:5902,点击connect连接
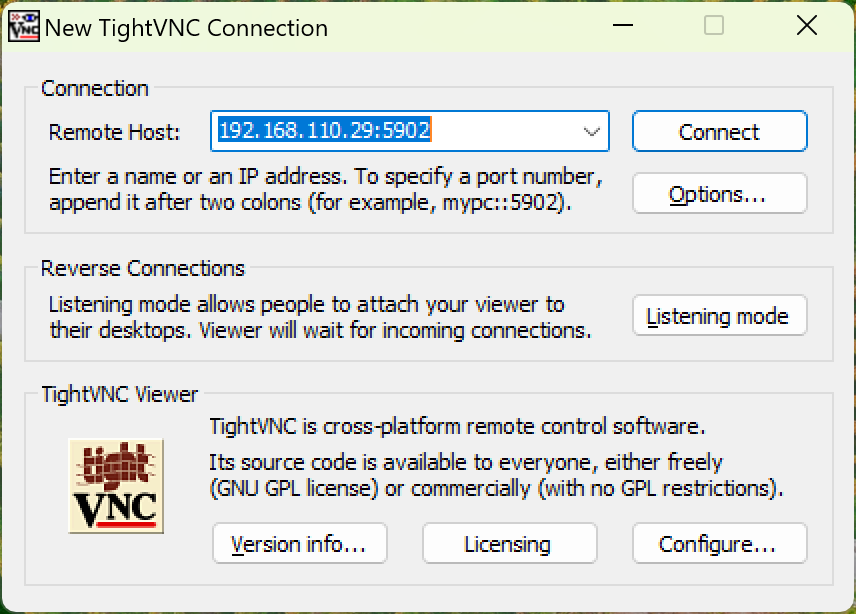
- 跳转后,提示输入密码:
aidlux,点击ok按钮后即可连接。
3. ROS2 Humble 安装
机器人操作系统 (ROS) 是一套用于构建机器人应用程序的软件库和工具。 从驱动程序、先进的算法到强大的开发者工具,ROS 提供了您下一个机器人项目所需的开源工具。 在安装ROS2 Humble时,会同时安装rviz2。
3.1 安装
- 按第 1 步操作,进入到
机器人页面后,点击ROS2 Humble图标,跳转到安装页面

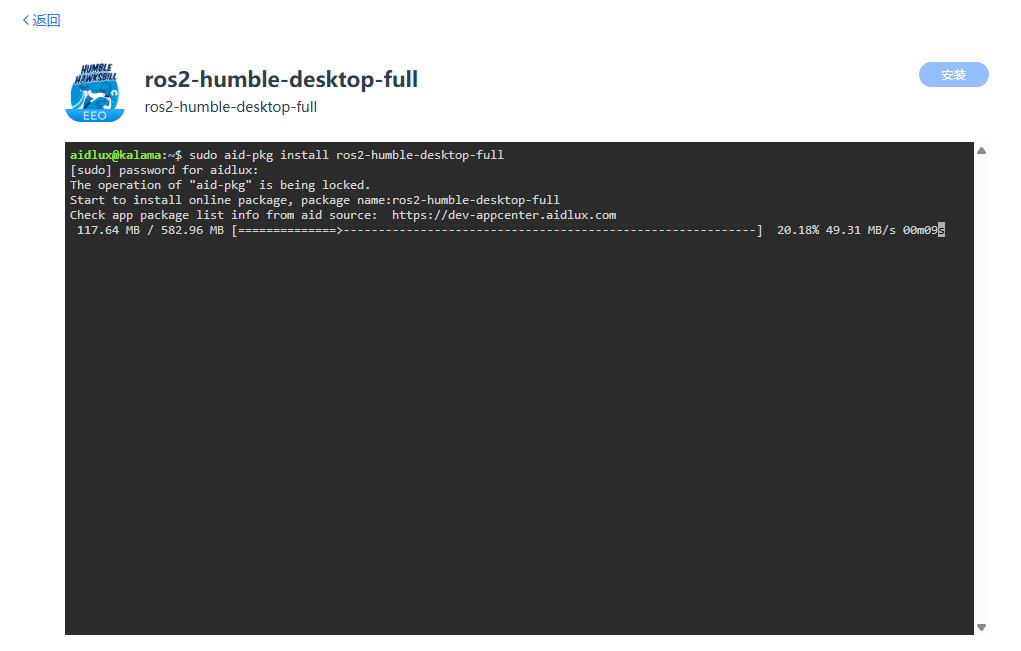
- 点击
安装按钮,输入 AidLux 密码:aidlux,等待安装完毕即可

3.2 验证
安装完 ROS2 Humble 后,可通过如下方法进行验证是否安装成功。
通过 VNC 工具登录到 Ubuntu Desktop 桌面。
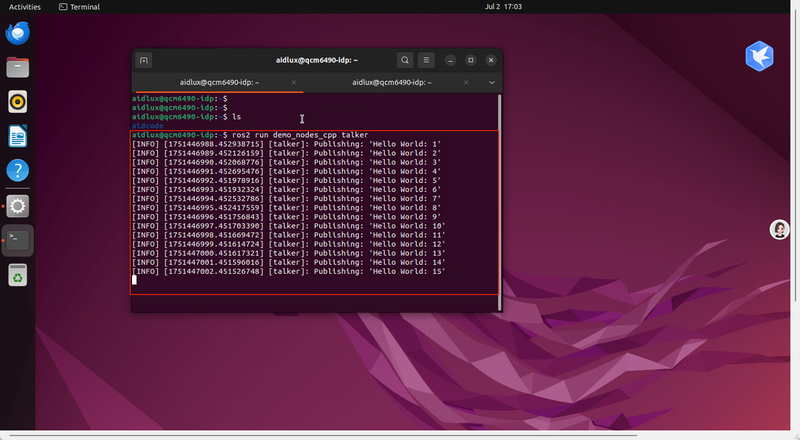
打开 Terminal 窗口,执行命令:
ros2 run demo_nodes_cpp talker,发送消息
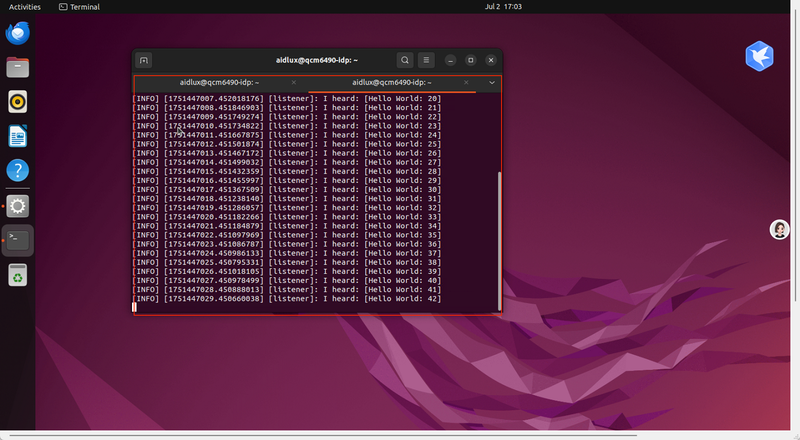
- 再打开一个 Terminal 窗口,执行命令:
ros2 run demo_nodes_cpp listener,监听消息
4. Moveit2 安装
MoveIt 2 是在 ROS 2 (Robot Operating System 2) 平台上应用最广泛的、用于移动机器人(特别是机械臂)进行运动规划 (Motion Planning)、 操作控制 (Manipulation)、三维感知 (3D Perception) 和运动学计算 (Kinematics) 的开源软件框架。
4.1 安装
- 按第 1 步操作,进入到
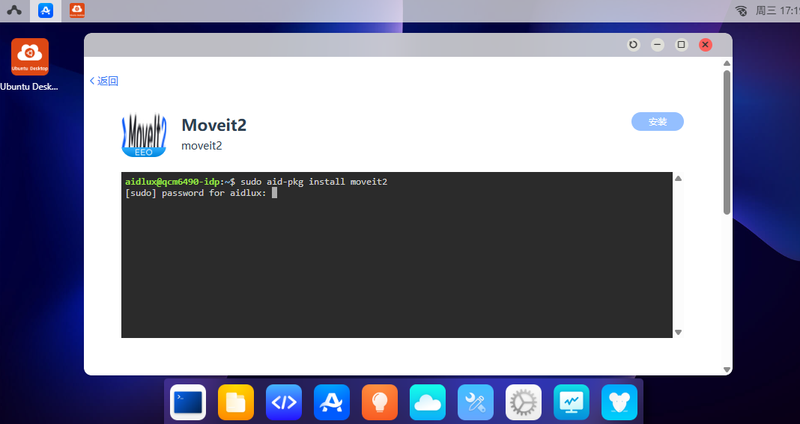
机器人页面后,点击Moveit2图标,跳转到安装页面
- 点击"安装"按钮,输入AidLux密码:aidlux ,等待安装完毕即可。

4.2 验证
安装完 Moveit2 后,可通过如下方法进行验证是否安装成功。
通过VNC工具登录到 Ubuntu Desktop 桌面。
打开 Terminal 窗口,执行命令:
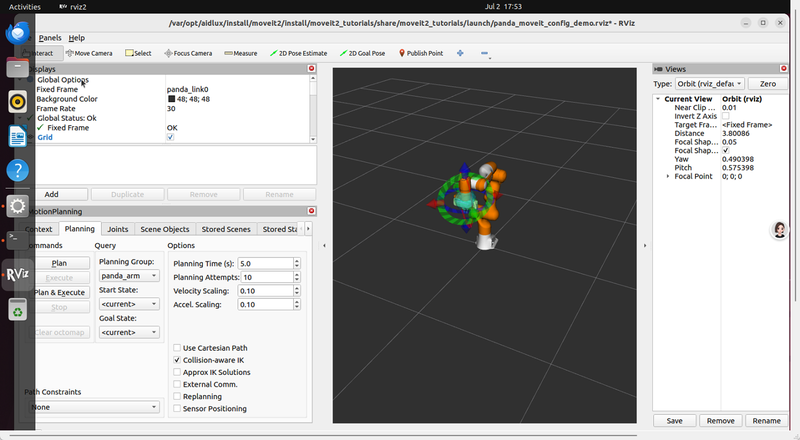
source /opt/ros/humble/setup.bash,初始化环境再次执行命令:
ros2 launch moveit_resources_panda_moveit_config demo.launch.py,在弹出的 rviz 中可以移动机械臂
5. Gazebo 安装
Gazebo 是一款功能强大、开源的三维机器人动力学仿真平台。它不仅仅是一个能“看到”机器人的三维可视化工具,更是一个能够精确模拟物理世界、传感器数据和 机器人行为的虚拟试验场。
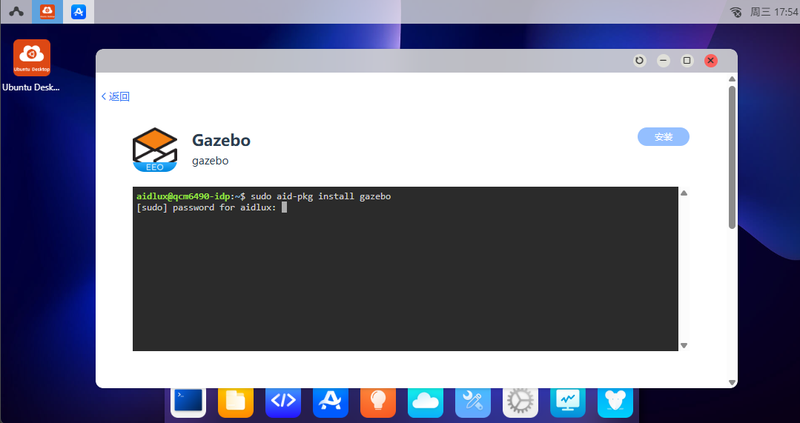
5.1 安装
- 按第 1 步操作,进入到
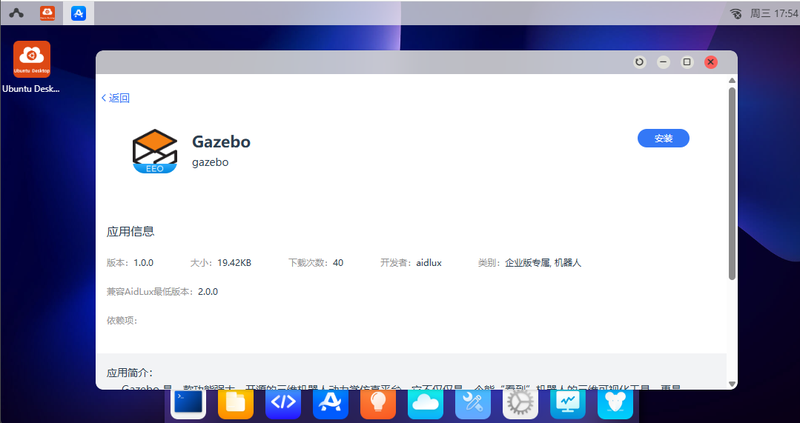
机器人页面后,点击Gazebo图标,跳转到安装页面。

- 点击
安装按钮,输入 AidLux 密码:aidlux,等待安装完毕即可
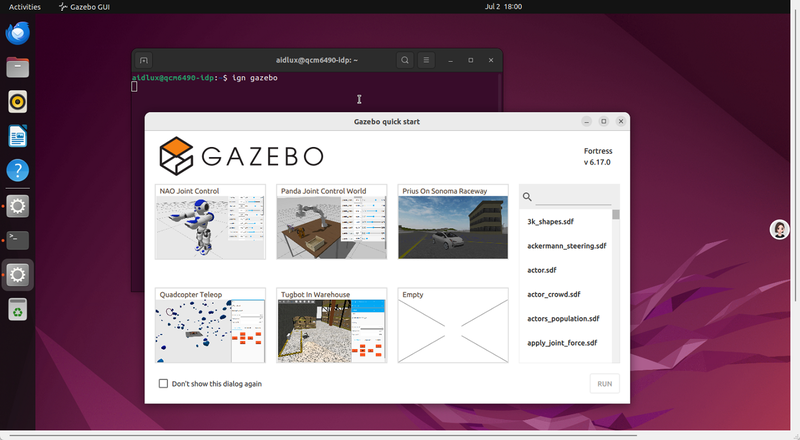
5.2 验证
安装完 Gazebo 后,可通过如下方法进行验证是否安装成功。
通过 VNC 工具登录到 Ubuntu Desktop 桌面。
打开 Terminal 窗口,执行命令:
ign gazebo,会弹出 Gazebo。